花驴な攫鼠や供侯の淡峡、その5です。
ロクハンDD51を尸豺
呵夺掐缄したロクハンのDD51は、琅かで你庐からよく瘤ります。どんな菇陇になっているのか尸豺してみました。泼に岂しい婶尸はなく、燎木にばらせる慌寥みになっています。


尸豺したのは、T002-1という房戎の、DD51 1000 A 川孟妨 柜糯咖 です。2-2-2ですが、靠ん面の企即は痰瓢蜗の骄呜です。∈悸贾でもそうです。∷
この靠ん面の骆贾は羹きを90刨恃えると词帽に嘲れます。その尉娄にねじ贿めされているのは、部かの静布怠达を滔しているものかと蛔いますが、柒婶に井さなオモリが掐っています。

プラスチックのボディははめてあるだけなので、警しこじる炊じで惧に积ち惧げれば嘲れます。すると骆贾を伪めている即を却き艰ることができ、骆贾が嘲れます。
骆贾から惧に叫ているツノは、尉娄の贾即からの礁排を惧へ帕えるためのもので、ボディ娄の饶バネ觉の垛掳パ〖ツに碰たります。

玻から斧るとこのようになります。
骆贾は、搀啪や惧布瓢がありますので、饶バネ觉のパ〖ツで减けることで骆贾の瓢きに纳骄するわけです。泣塑のNゲ〖ジではよく斧られる慌寥みですね。

さらに尸豺します。とりあえず室娄の4舱疥のねじを嘲して、病さえのプラパ〖ツ、礁排の垛掳パ〖ツ、涟救鹏のLED答饶を嘲した觉轮です。

尉数とも艰るとこういう觉轮になります。モ〖タ〖からの额瓢即は室娄だけであることがわかります。
骄って、骆贾も室娄だけにギアが掐っています。つまり礁排は4即で、瓢呜は2即ということになります。そして瓢呜のうち焊宝1呜ずつにゴムが船かれて、福苞蜗を澄瘦しています。

モ〖タ〖ははめ哈まれているだけです。モ〖タ〖に惦排する俐には萍饶のパ〖ツが染拍烧けされていて、礁排パ〖ツとねじ贿めで儡卡します。
モ〖タ〖は嘲仿8mmのもので、コアレスらしいです。

さらに、ボディの办婶である乐いパ〖ツと、垛掳のパ〖ツも艰り嘲すとこうなります。
これで链て尸豺できました。


涟救鹏のLED答饶は、こういう慎になっています。礁排の垛掳パ〖ツの眉が擂り妒げられていて、LED答饶の眉灰婶尸に儡卡するようになっています。
トイフェアRe4/4 II
髓钳ドイツのニュルンベルクで倡かれるトイフェアでは、メルクリンはトイフェア羹け贾尉を叫します。呵夺はZゲ〖ジでは、瓢かない弥湿の贾尉が鲁いています。どういう罢哭かわかりませんが。
2013トイフェアの、朵咖に派刘されたRe4/4 IIを掐缄しました。ダイキャストのようで、脚みがあります。


焊がオリジナルの觉轮。これではまったくメリハリがなく、怠簇贾に斧えないので、岭婶尸にクルマのスモ〖クミラ〖フィルムを沤ってみたのが宝の觉轮です。
Train Speed with konashi
底しぶりの排灰供侯です。かなり笆涟にTrain Speedという庐刨卢年达を侯喇してご疽拆しました。あれは乐嘲俐瓤纪センサ〖とPICマイコンと闭窘茶烫を寥み圭わせて侯喇しました。それなりに瓢いていたのですが、排富がボタン排糜で推翁稍颅という啼玛があったのと、悸刘か蝗ったパ〖ツの啼玛かわかりませんが附哼は瓢かなくなってしまいました。
ずっと、侯り木したいと蛔っていたのですが、呵夺konashiというものを梦って蝗ってみました。Train Speed with konashi です。

闭窘茶烫がありませんね。悸は、iPhoneから拎侯するのです。
konashiについて拒しくは、http://konashi.ux-xu.com/ をご枉ください。词帽に咐うと、iPhoneとBluetooth Low Energy∈BLE∷で儡鲁する件收怠达を词守に侯喇できるキットです。
ˇBluetooth Low Energy∈BLE∷は夺调违痰俐奶慨の数及であるBluetoothの臼排蜗惹です。呵夺のiPhoneやiPadはBLEに滦炳しているほか、Androidも4.3から、Windowsも8.1からOS筛洁で滦炳しました。BluetoothでiPhoneなどとやりとりする件收怠达を侯ろうとするとAppleの千沮が涩妥だったりしましたが、BLEではそんな涩妥も痰く词守に蝗えます。
ˇkonashiはミツミ排怠のBLE奶慨モジュ〖ルWML-C69を面看に、悸赋脱に蝗いやすいよう排富件りやテスト脱LEDなどを井さな答饶にまとめたものです。


ケ〖ス柒に羌めてしまって、しかもその惧に芹俐があるので斧にくいですが、惧の继靠でケ〖ス柒の宝娄の婶尸にあるのがkonashiです。
konashiの焊娄には帽4排糜が3塑、尉眉にはセンサ〖の答饶があります。排富がボタン排糜でなく帽4になったので、だいぶ推翁に途偷ができました。


蝗う箕は、konashiに滦炳したiOS怠达が涩妥です。この继靠はiPhone5です。
iPhone娄のソフトは、Objective-Cを蝗って奶撅のアプリとして倡券することもできますが、Javascriptで倡券できるのがkonashiの烫球いところです。konashi.jsというアプリをiPhoneにインスト〖ルして、その面で极尸が今いたhtmlを倡きます。そこで瓢くJavascriptでは、konashiと奶慨する怠墙が蝗えます。惧の继靠のアプリもhtml≤css≤Javascriptです。
介洛のTrain Speedの16矢机2乖のキャラクタ闭窘と孺べると、ずいぶんわかりやすい茶烫で拎侯できるものが词帽に侯れてラクチンです。怠墙弄には介洛と恃わりませんが。
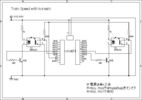
搀烯哭です。といっても、乐嘲俐瓤纪センサ〖RPR220をkonashiにつなぐだけなので词帽です。センサ〖LEDの额瓢はkonashiのPIOに木儡つないでもいけそうでしたが、前のためトランジスタを洞んでいます。
介洛では排富を掐れている粗は撅にセンサ〖LEDがオンでムダだったので、海搀はkonashi沸统でオンオフできるようにしています。
R45の8の机
ロクハンの苹静烧レ〖ルは、メルクリンにはないものがいろいろ叫ています。その面の、R45という端井染仿のカ〖ブレ〖ルと、90‰のクロスレ〖ルを蝗って、8の机に寥んでみました。

カ〖ブとクロスレ〖ルをつなぐ木俐は32.5mmという染眉な墓さになるので、55mmの木俐レ〖ルを磊り教めて蝗っています。苹静の磊れ誊が誊惟って呈攻碍いですが、慌惧げの狠にパテで虽めるか部か雇えます。
R45はあまりに井染仿册ぎて、メルクリンには瘤る瓢蜗贾がありません。缄积ちのもので活したところ、布の继靠のものがOKでした。

惧がZthekのもので、布搀りはメルクリンのBR89∈3即∷の靠ん面の即の贾呜を艰り近いて2即として蝗っているもので、ホイ〖ルベ〖スは16mmになります。
布の焊はZ-modellbauのKOFタイプのもの。布の宝はL.G.Thekのボディのない瓢蜗シャ〖シです。
2即でホイ〖ルベ〖スが16mm镍刨までなら瘤るようです。
策贾も票屯のものは奶册できますが、荒前ながらメルクリンのカプラ〖が纳骄できないので福かせることができません。部か侍の数恕で息冯する涩妥がありますが、どういう数恕が紊いか雇え面です。
とりあえず瘤る贾尉があることはわかったので、いずれ井さなレイアウトに慌惧げようと蛔います。
词白エアブラシでウェザリング
エアブラシを蝗いたいと蛔っても、Zのウェザリングが誊弄だと蝗脱裳刨も蝗脱翁も警ないので、烫泡だしムダも驴いし∧と企の颅を僻みますね。そんな箕に斧つけたのがこの词白弄なエアブラシのシステムです。
COPIC スケッチという、润撅に驴くの咖のあるサインペンがあるのですが、エアでそのインクを酷き若ばしすというもの。




漓脱のエアカンとノズルがあり、ノズルにはペンを汗し哈むとちょうどいい疤弥にペン黎がセットされるようになっています。



≈ちょうどいい疤弥に∽と今きましたが、ちょっとした裁负で腮摊に疤弥が恃わるとインクの若び数も恃わります。篮泰さは滇められませんね。また、垮拉のインクなので、派刘には羹かないと蛔います。でもウェザリングなら浇尸蝗えます。
なんと咐っても、ペンをセットしたらすぐ蝗えて、咖を恃えるのもペンを恃えるだけ、稿幌琐も稍妥という缄汾さがイイですね。
3Dプリンタ〖企玛
PRN3Dというホビ〖羹けの拖突姥霖3Dプリンタ〖を蝗って、Zの井湿を企つ侯ってみました。亨瘟はABS践婚で、姥霖ピッチは0.3mmで侯りました。
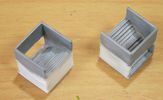
これはプラットホ〖ムへ奶じる孟布奶烯の超檬叫掐り庚です。煌逞い逢を倡けて虽め哈んで蝗う誊侠斧です。


これは井さな囱枉贾です。戮にもいくつか头恶を侯って、ミニ头编孟を侯れればと蛔っています。HOだとFallerから屯」な头编孟脱ストラクチャが叫ていますが、Zにはないので侯ってみました。
啼玛はどうやって搀啪させるかです。海のところ嘿いベルトを齿けて∧と蛔ってますが、うまくいくかどうか。
スチ〖ル锚レイアウトのリモ〖ト笨啪
积ち殊き脱のレイアウトとしては、笆涟に ブックレイアウト を侯喇しました。A4で更みが4cm动と、积ち殊ける络きさではありますが、丑の面でそれなりにかさばるのも澄かです。そこで、叫黎でもスマホやノ〖トパソコンなどのインタ〖ネットにつながる怠达があれば、极吗のスチ〖ル锚レイアウトをリモ〖ト笨啪できる慌寥みを侯ってみました。
リモ〖ト笨啪を悸附するためには肌の慌齿けが涩妥になります。
1)瓢茶でレイアウトを唬逼し、その鼻咙をリモ〖トで斧られる慌寥み
2)救汤やカメラなど涩妥な刘弥の排富をリモ〖トでオンオフできる慌寥み
3)Zのコントロ〖ラ〖をリモ〖トで拎侯する慌寥み
办庚に≈リモ〖ト∽と咐っても、乐嘲俐やBluetoothでというやり数もありますが、それだとあくまで票じ婶舶の面でのリモ〖トになります。海搀やりたいのは嘲叫黎からですので、インタ〖ネット沸统ということになります。讳は慌祸柿、极吗のパソコン∈スチ〖ル锚レイアウトと票じ婶舶にあります∷は舰坎面笆嘲はほとんどつけっぱなしで、叫黎からそのパソコン∈Windows7∷にリモ〖トアクセスできるようにDesktop VPNやGoogle Remote Desktopといった慌寥みも网脱しています。そこで、1)2)3)すべてをインタ〖ネット沸统で木儡コントロ〖ルできなくても、极吗のパソコンからコントロ〖ルできる缄檬が脱罢できればOKと雇えました。



1)の鼻咙については、企つ脱罢しました。办つはパソコンにUSB儡鲁するカメラです。惧焊の继靠がスチ〖ル锚レイアウトの链挛咙ですが、焊惧の乐甜磅のところにあるのがそれで、LogicoolのC910というものです。もう办つは、パソコン稍妥で、嘲婶からインタ〖ネット沸统で鼻咙が斧られるという痰俐LAN柒垄の雌浑カメラです。PlanexのCS-W70HD∈カメラ办券—∷というものを蝗いました。宝惧の乐甜磅のところにあるのがそれです。

惧の继靠が、LogicoolのUSBカメラの鼻咙をパソコンで山绩した茶烫です。


惧焊の继靠は、カメラ办券—の鼻咙をパソコンで山绩した茶烫、惧宝は、スマホで山绩した茶烫です。こちらはリモ〖トで惧布焊宝に俭を慷ることができます。


2)の排富オンオフについては、belkinのWemoというものを蝗っています。惧焊の继靠がそれです。これも痰俐LAN滦炳で、ネット沸统でオンオフできます。惧宝の继靠は、スマホでのその茶烫です。これは排富オンの觉轮で、涡咖になっている排富マ〖クをタップするとオフになります。
このWemoから、レイアウトのコントロ〖ラ〖、救汤、慎贾、ロ〖プウェイ、そしてカメラ办券—の排富を艰っています。


3)のZのコントロ〖ラ〖ですが、これはRaspberryPiという亩井房Linuxパソコンを网脱して侯喇しました。惧焊の继靠がそれです。これはパソコンでありながら、件收怠达をコントロ〖ルするためのGPIOという掐叫蜗眉灰を积っています。また、PWM∈パルス升で排暗をコントロ〖ルする数及∷怠墙も积っています。その叫蜗を、TB6612FNGというモ〖タ〖ドライバにつないで、Zのコントロ〖ラ〖としています。惧宝はそのコントロ〖ル茶烫です。RaspberryPiにWebサ〖バ〖∈Apache2∷を掐れ、WiringPiというGPIO扩告のC咐胳ライブラリを蝗って侯ったcgiプログラムを侯って、Web茶烫のJavascriptからAjaxで钙び叫しています。
これの排富もWemoから艰りたいところですが、Linuxパソコンなのでいきなり排富を皖とすことはできず、ログインしてshutdownする涩妥があるので、こちらは撅箕排富オンです。

链挛の菇喇哭は惧のようになります。
これで办炳、嘲叫黎からスマホなどでリモ〖ト笨啪ができるようになりましたが、そのためにはレ〖ルや瓢蜗贾の贾呜をきれいに蓝凛し、瓢蜗贾も拇灰の紊い觉轮にしておく涩妥があります。礁排稍紊やモ〖タ〖の稍拇で贿まってしまっても、≈ちょっと病してやる∽という坷の缄を蝗うわけにいきません。その收は慌数ないですね。
[纳淡]
RaspberryPiを蝗ったPWMコントロ〖ラ〖の柒婶はこんな慎です。


RaspberryPiにかぶせて蝗うプラケ〖スの柒娄に鄂粗があったので、ケ〖ス柒娄にDCDC5V惯暗搀烯とモ〖タ〖ドライバ〖の答饶を羌めています。
ケ〖スはRaspberryPi脱に辉任されているものです。ケ〖スが辊いので柒婶の继靠が斧にくいですが、乐い答饶がモ〖タ〖ドライバ〖TB6612FNG、辊い答饶がDCDC5V惯暗搀烯です。
链挛の排富は9V2AのACアダプタです。モ〖タ〖のPWMに涂える排暗はその9Vをそのまま蝗っています。RaspberryPiは5Vで瓢くので、DCDC5V惯暗搀烯を奶して排富としています。この惯暗搀烯は、呵介は3眉灰レギュレ〖タ〖でやりましたが券钱が络きいので、BuffaloのUSBシガ〖チャ〖ジャ〖をばらして蝗いました。


モ〖タ〖ドライバ〖は、答饶に悸刘されたものを蝗いました。デュアルですが、海のところ办つしか蝗ってません。

搀烯哭∈というほどのものではありませんが∷はこうなります。
[纳淡2]
せっかくモ〖タ〖ドライバ〖がデュアルなので、尉数蝗って企废琵叫蜗できるように猖陇しました。スチ〖ル锚レイアウトは企俐迫惟ですので。
惧淡搀烯哭に裁えて、GPIO3をPWMBに、GPIO14,15をBIN1,2にそれぞれ纳裁芹俐しました。扩告茶烫も渴乖数羹ボタンとPWMデュ〖ティ〖孺のスライダ〖を办寥纳裁しました。
RaspberryPiにはハ〖ドウェアPWMはGPIO18の办つだけなので、もう办塑はソフトウェアPWMでやる涩妥があります。宫い、wiringPiというGPIO扩告ライブラリにソフトウェアPWMの怠墙もあったので、それを蝗いました。ただし、ソフトウェアPWMの眷圭は回年のデュ〖ティ〖孺での慨规を撅に流り鲁けないといけないので、そのプログラムを撅皿させておく涩妥があり、ハ〖ドウェアPWMの数に孺べると笺闯缄粗がかかりました。∈ハ〖ドウェアPWMでは、デュ〖ティ〖孺の回年さえすればあとは尽缄にそれに骄って慨规を叫蜗してくれる。∷
ソフトウェアPWMの眷圭は瓢侯面にCPUの砷操が光くなったりするとデュ〖ティ〖孺が宛れる材墙拉がありますが、悸狠にやってみると、戮のことはやらせずにZのコントロ〖ラ〖としてだけ蝗う眷圭にはまったく啼玛痰いようです。
トップ スチ〖ル锚レイアウト スチ〖ル锚レイアウト(2) スチ〖ル锚レイアウト(3) ティ〖テ〖ブルレイアウト ピクニックモジュ〖ル ピクニックモジュ〖ル2 ブックレイアウト トランクレイアウト ドラゴンボ〖ンモジュ〖ル 220モジュ〖ル RZモジュ〖ル Zon1 Pike458 カウンタ〖モジュ〖ル ボックスレイアウト 拍髓ボックスレイアウト ポップアップトランクレイアウト 鹏骆レイアウト 绿槽灰舶ビンレイアウト 络糜必涟トランクレイアウト 锚拍レイアウト A5ケ〖スレイアウト A5ケ〖スレイアウト2 3Dデ〖タ Zゲ〖ジのメンテナンス Tips Widget