雑多な記録その6です。
Z dual PWM controller with konashi
konashi(iPhoneなどとBLE=Bluetooth Low Energyで接続して機能を拡張するための小型基板)を利用した速度計はすでにご紹介しました。konashiにはソフトウェアPWM機能があるので、これを使ってPWMのZ用コントローラーを作ろうと以前から思ってました。最初はモータードライバーにTA7291を使用しようと考えたのですが制御信号が5Vで、konashiのPIOは3Vのためにうまくいきませんでした。
Tips(5) のリモート運転の項でご紹介したTB6612FNGというモータードライバだと3Vでもいけるので、これを使ってみることにしました。


これが外観です。TB6612FNGがデュアルのモータードライバなので、デュアルのコントローラーとしました。電源は9V2AのACアダプタで、電源スイッチは省略してACアダプタをつなげば電源オンです。
konashiのJavascriptライブラリを利用して、制御画面を作りました。A,B二つの出力について方向と速度を調節できます。

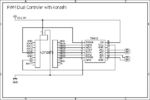
内部と回路図です。TB6612FNGは、保護回路なども一緒に実装されたROB09457という製品を使ったので、部品はkonashiとそれだけで、非常に簡単な工作です。
室内でのリモート運転には便利ではないかと思います。
ガラスタンク車にライト
Zのガラスタンク車にライトを入れてみました。


上部のコルクキャップにLEDを仕込んで光らせています。
走らせた様子です。途中で明かりを消しています。軽いのと2軸ということで、どうしてもちらつきはありますね。

走らせた時は、水を入れて、水面が揺れることでの光の揺らめきを狙ってみましたが、あまり目立った効果はないようです。


コルクキャップの下面にチップLEDをつけて、細いワイヤーで床下へ。床下にはリン青銅板を切って作った集電板と、10mmAの定電流ダイオードを仕込みました。ブリッジダイオードは入れてないので、光るのは一方向だけです。
Train speed with espruino
列車の速度計はこれまでいくつか作ってきましたが、初代のPIC使用のものはボタン電池だったので保ちが悪い上にどこかの半田付けがまずかったのか動かなくなり、二代目のwith konasiは動作にiPhoneが必要、とそれぞれ不満点がありました。Espruino picoという小型のマイコンボードを見つけたのでそれを使って作ってみました。http://www.espruino.com/
Espruinoの特徴はJavaScriptの処理系が組み込まれていて、ソフトの開発が容易だという点です。開発環境も用意されていて、パソコンとUSBで結んでJavaScriptのプログラムを書き込んでは試す(console.log()の出力が開発環境で見られる)ということが簡単にできます。


上面にはModeとSelectの二つのボタンと液晶ディスプレイ、それにセンサー検知時のLEDの点灯を確認するための穴があります。側面に電源ボタンの他、両端に反射型赤外線センサーがあります。


ディスプレイは128×64ピクセルのモノクロ液晶で、幅25mm高さ15mmほどです。
二つのボタンで次のように動作します。
Modeボタンで、テスト(Test)→計測(Wait)→スケール設定(Set)→列車長設定(Set)→テスト とモード切替。
計測(Wait)時は、○○(検知待ち)→○●または●○(もう一方検知待ち)→●●(両方検知して換算速度を表示)→列車長だけ通過待ち(Pass)→Waitに戻る。測定結果は最近三回の結果を表示するようにしました。
設定時のSelectでスケールまたは列車長を選択。テスト・計測時にSelectで画面向き変更。
ModeとSelect両押しは設定の保存。


内部はこのようになっています。ユニバーサル基板にEspruino picoを乗せています。電源は単4電池3本です。
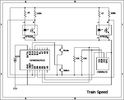
回路図です。液晶ディスプレイはI2C接続です。
JavaScriptのプログラムです。(いろいろ試している途中なので汚いソースですが。) → trainspeed.js(794)
レールクリーナー
今までいろいろなやり方でレールクリーナーを作ってきましたが、全体を3Dプリンターで作ってみました。コレが一番制作はラクチンですね。


ヘッド部の下部にはフェルト(家具の足裏に貼る傷防止用のもの、100円ショップなどで)を貼ってます。そこに吸水性のある紙(台所の天ぷら敷紙や、工業用の紙ウェスなど)を短冊状に切ったものを巻き付けて、留め具をスライドさせて留めます。



3Dプリンター用のデータを 3Dデータ のページに置いてますので、興味のある方はどうぞ。
センサータイマーコントローラー
反射型赤外線センサーやタイマーによって自動停止し、自動反転もできるコントローラーを作りました。

マニュアル、タイマー、タイマー+自動反転、センサー、センサー+自動反転、の5つのモードがあります。タイマーやセンサーの時に走行時間(センサー時はその時間の間は検出しない)と停止時間を調整できます。青と赤の二つのボタンで、走行・停止切替と、これらのモードや時間の設定をおこなうようになっています。
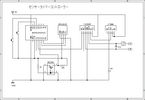
出力電圧の調整は、これまでも使ってきたLT3080+ボリュームによります。そしてその出力のオンオフと極性反転は、モータードライバICのTA7257Pを用いています。センサー検知やタイマーとそれにもとづくモータードライバICの制御はEspruino Picoによっておこなっています。動作モードがいくつかあるので、LCDディスプレイを付けました。
最近のモータードライバICは、PWM制御を前提としているものが多いのですが、TA7257Pはモーター出力用に与えた電圧がそのまま出て、オンオフと極性のみ制御してくれます。Zゲージのモーターも、メルクリンの新旧にロクハンと種類が増えて、PWMでやろうとすると難しい場合もあります。そこでLT3080による電圧調整として、TA7257Pを組み合わせました。残念ながらTA7257Pはすでに廃番で、入手が困難になっています。
Espruino Picoのプログラムはこちら → sensortimercontroller.js(645)
トップ スチール棚レイアウト スチール棚レイアウト(2) スチール棚レイアウト(3) ティーテーブルレイアウト ピクニックモジュール ピクニックモジュール2 ブックレイアウト トランクレイアウト ドラゴンボーンモジュール 220モジュール RZモジュール Zon1 Pike458 カウンターモジュール ボックスレイアウト 田毎ボックスレイアウト ポップアップトランクレイアウト 灯台レイアウト 駄菓子屋ビンレイアウト 大池駅前トランクレイアウト 棚田レイアウト A5ケースレイアウト A5ケースレイアウト2 3Dデータ Zゲージのメンテナンス Tips Widget